
近期,信息学院青年教师卢昊团队在遥感领域TOP刊物《Remote Sensing》(2022年影响因子为5.349)发表了在利用深度神经网络实现大规模森林场景三维点云智能理解方面的进展,北京林业大学为第一完成单位。
森林场景三维结构对高精度森林资源监测、森林生态系统研究具有重要意义,高分辨率、高精度林区地形数据是森林三维结构推算的关键基础。近年来,使用无人机(Unmanned Aerial Vehicles, UAV)搭载激光雷达(Light Detection and Ranging, LiDAR)获取森林3D点云、开展三维结构的研究受到越来越多的关注。地面点云滤波算法是构建森林数字地面模型的必要技术过程,传统的滤波算法要求根据场景、数据和算法的特点选择合适的参数,性能高度依赖于经验和算法本身的适应性,在地形多变、植被结构复杂的森林场景往往受到制约。
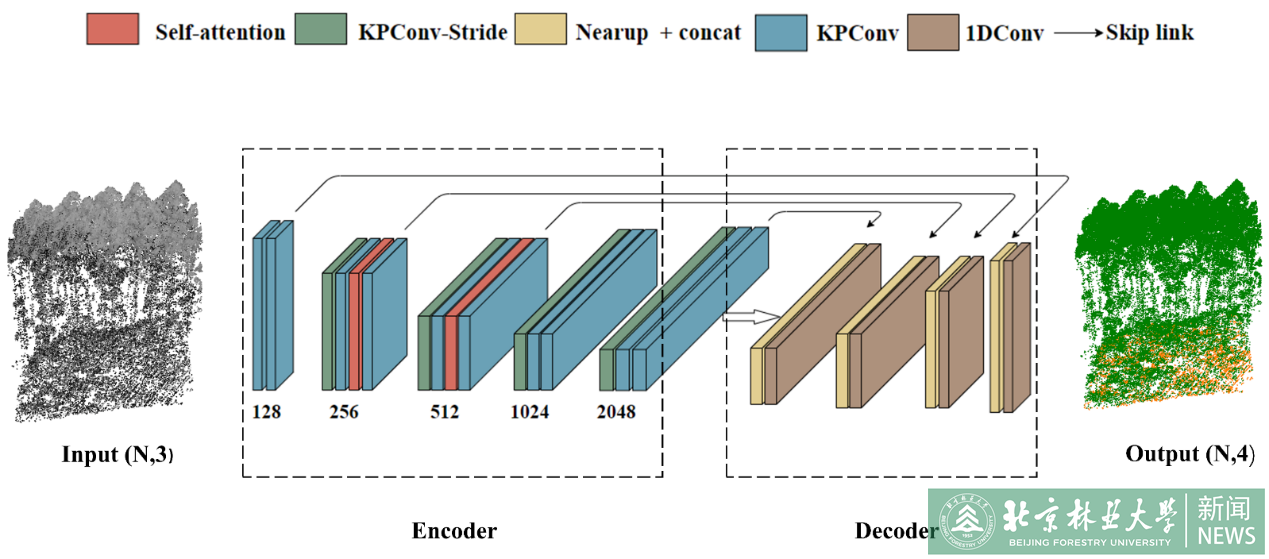
图1:新的Terrain-net深度神经网络结构
针对上述问题,卢昊团队提出了使用深度神经网络解决森林点云理解的方法,设计了一个端到端的的高效网络Terrain-net(图1),其结合了3D点云卷积和自注意力机制,可以很好地捕获和融合点云局部和全局特征。网络使用覆盖多种森林环境的70块森林样地超过1500万个人工标注点进行训练,并在17块样地进行评估。Terrain-net与多种经典的滤波算法和深度学习方法进行了比较,实验结果(图2)表明,Terrain-net在多项评价指标上表现最佳。同时,在机载激光雷达(Airborne Laser Scanning, ALS)公共数据集OpenGF上进行了网络泛化能力测试,结果表明Terrain-net在直接迁移到其他大规模场景、其他植被覆盖环境和由其他传感器点云数据时依然表现出良好性能。这一新的网络将为森林场景点云理解、森林垂直结构观测等研究提供很好的技术支撑。
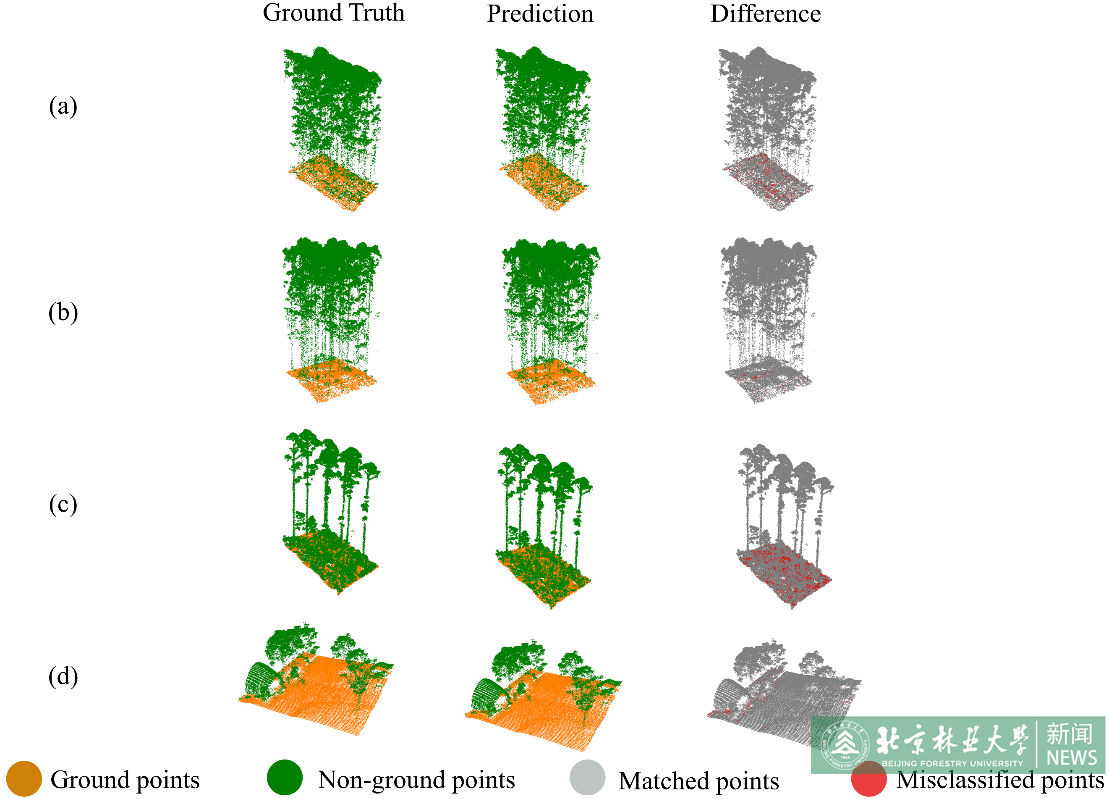
图2:Terrain-net地面滤波结果展示
该工作以题为“Terrain-Net: A Highly-Efficient, Parameter-Free, and Easy-to-Use Deep Neural Network for Ground Filtering of UAV LiDAR Data in Forested Environments”的论文发表,信息学院2021级硕士研究生李博文和指导教师卢昊为共同第一作者,卢昊为通讯作者。该研究受到国家重点研发计划项目“森林资源激光雷达遥感动态监测与蓄积量估测技术联合研发” (2020YFE0200800)和国家自然科学基金项目“多源机载LiDAR数据融合的落叶松表型分析方法研究”(42001376)的资助,卢昊为北京林业大学承担课题/项目的负责人。
论文链接:https://www.mdpi.com/2072-4292/14/22/5798,网络模型将开源在:https://github.com/bjfu-lidar/terrain-net。